Buscar
 Notebook week 4: Manipulation
Notebook week 4: Manipulation
(2017-03-29)
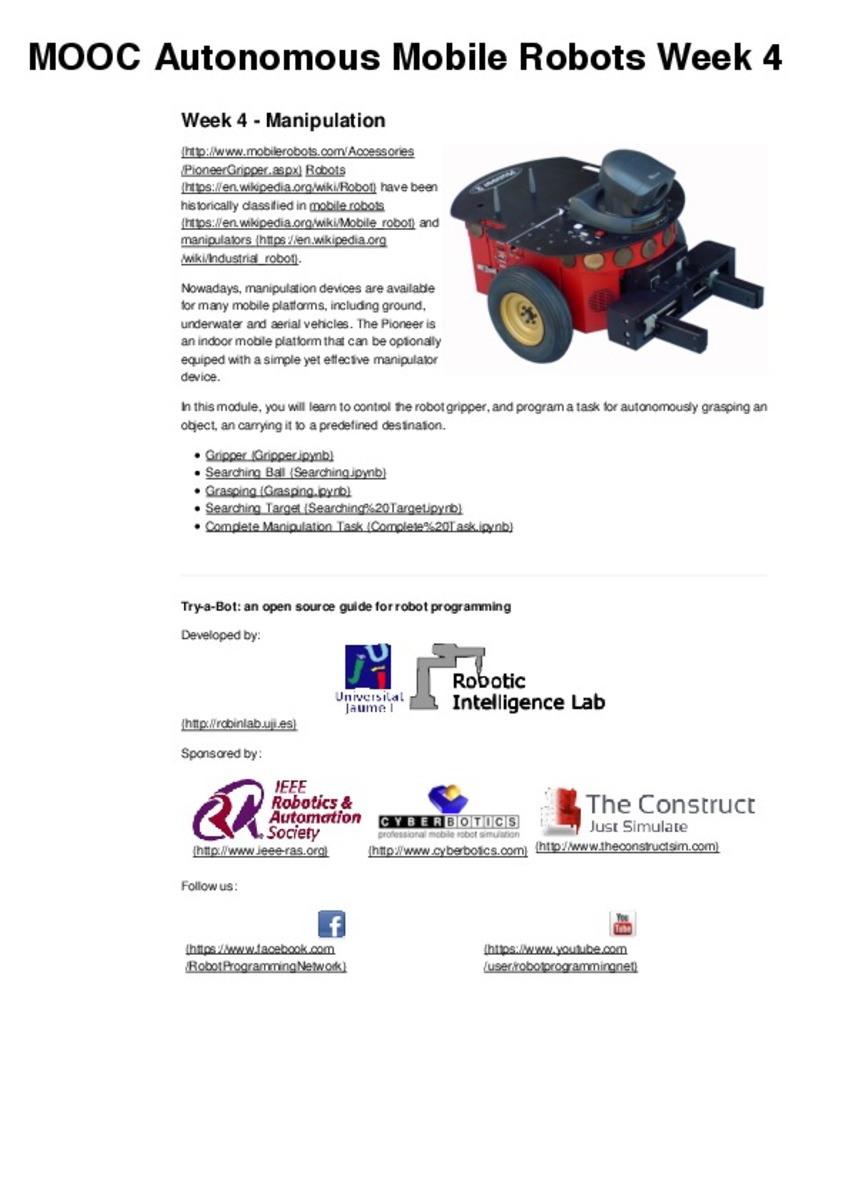
In this module, you will learn to control the robot gripper, and program a task for autonomously grasping an
object, an carrying it to a predefined destination.
Notebook 6: Ball Picking Challenge Part 2: Pick and Place
(2017-03-29)
The aim of this week is to program the robot for the second part of the challenge: pick up the balls and
transport them to the corner. To do so, you need to reuse the abilities learnt in week 4; please feel free to
reuse ...
Simulation 4
(2017-03-29)
Simulation 5
(2017-03-29)

Notebook 1: Moving the robot
(2017-03-29)
During the first week, you will learn how a mobile robot moves, and how to program basic functions for sending commands to the motors, and calculating the distance travelled by the robot.
Simulation 1
(2017-03-29)
Simulation 3
(2017-03-29)
Notebook week 3: Vision
(2017-03-29)
In this module, we present the fundamentals of computer vision and image processing for a locomotion task: the robot will follow a line on the ground using a camera.
Notebook week 5: Ball Picking Challenge
(2017-03-29)
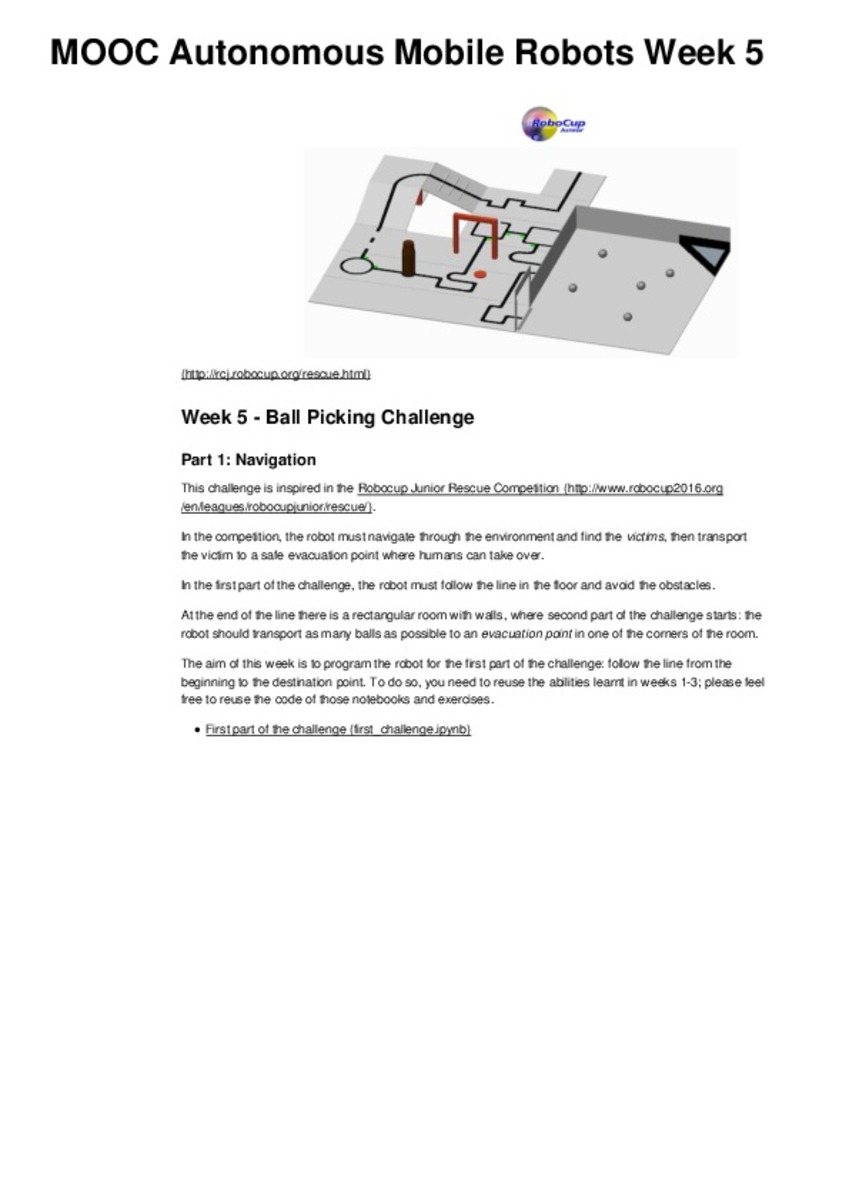
The aim of this week is to program the robot for the first part of the challenge: follow the line from the
beginning to the destination point. To do so, you need to reuse the abilities learnt in weeks 1-3; please feel
free ...
Simulation 2
(2017-03-29)





