Mostrar el registro sencillo del ítem
Notebook week 4: Manipulation
| dc.contributor.author | Cervera, Enric | |
| dc.contributor.other | Universitat Jaume I | |
| dc.date.accessioned | 2017-12-13T15:06:48Z | |
| dc.date.available | 2017-12-13T15:06:48Z | |
| dc.date.issued | 2017-03-29 | |
| dc.identifier.uri | http://hdl.handle.net/10234/170855 | |
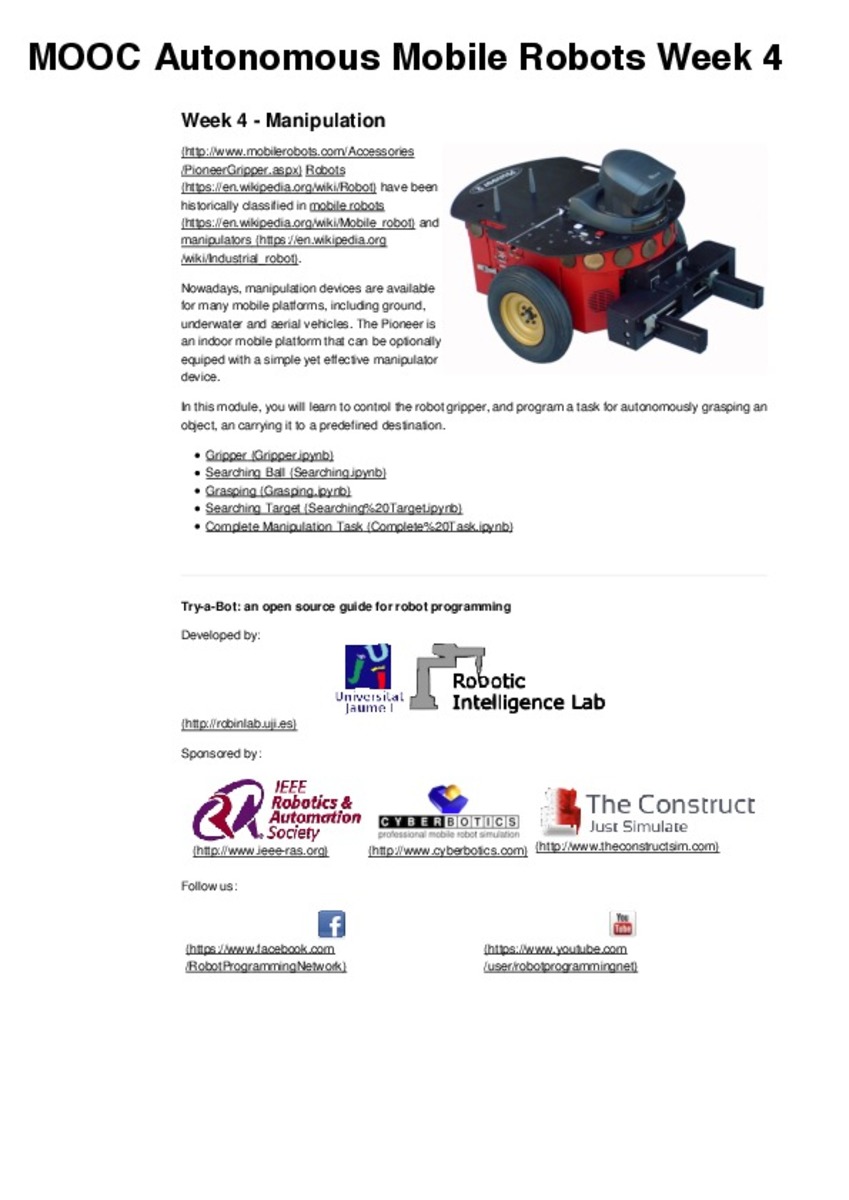
| dc.description.abstract | In this module, you will learn to control the robot gripper, and program a task for autonomously grasping an object, an carrying it to a predefined destination. | ca_CA |
| dc.format.mimetype | application/pdf | ca_CA |
| dc.language.iso | eng | ca_CA |
| dc.relation | MOOC: Autonomous Mobile Robots | ca_CA |
| dc.rights | Atribución-CompartirIgual 4.0 Internacional | * |
| dc.rights.uri | http://creativecommons.org/licenses/by-sa/4.0/ | * |
| dc.subject | mobile robots | ca_CA |
| dc.subject | robots móviles | ca_CA |
| dc.title | Notebook week 4: Manipulation | ca_CA |
| dc.type | info:eu-repo/semantics/learningObject | ca_CA |
| dc.rights.accessRights | info:eu-repo/semantics/openAccess | ca_CA |
Ficheros en el ítem
Este ítem aparece en la(s) siguiente(s) colección(ones)
-
4. Manipulation [2]

Excepto si se señala otra cosa, la licencia del ítem se describe como: Atribución-CompartirIgual 4.0 Internacional





