Mostrar el registro sencillo del ítem
Reconfigurable AUV for Intervention Missions: A Case Study on Underwater Object Recovery
| dc.contributor.author | Prats Sánchez, Mario | |
| dc.contributor.author | Ribas, David | |
| dc.contributor.author | Palomeras, Narcís | |
| dc.contributor.author | García Sánchez, Juan Carlos | |
| dc.contributor.author | Nannen, Volker | |
| dc.contributor.author | Wirth, Stephan | |
| dc.contributor.author | Fernández Fresneda, José Javier | |
| dc.contributor.author | Beltrán, Joan P. | |
| dc.contributor.author | Campos, Ricard | |
| dc.contributor.author | Ridao, Pere | |
| dc.contributor.author | Sanz, Pedro J | |
| dc.contributor.author | Oliver, Gabriel | |
| dc.contributor.author | Carreras, Marc | |
| dc.contributor.author | Gracias, Nuno | |
| dc.contributor.author | Marin, Raul | |
| dc.contributor.author | Ortiz, Alberto | |
| dc.date.accessioned | 2013-07-30T09:54:27Z | |
| dc.date.available | 2013-07-30T09:54:27Z | |
| dc.date.issued | 2012 | |
| dc.identifier.citation | PRATS, Mario, et al. Reconfigurable AUV for intervention missions: a case study on underwater object recovery. Intelligent Service Robotics, 2012, 5.1: 19-31 | ca_CA |
| dc.identifier.issn | 1861-2776 | |
| dc.identifier.uri | http://hdl.handle.net/10234/71444 | |
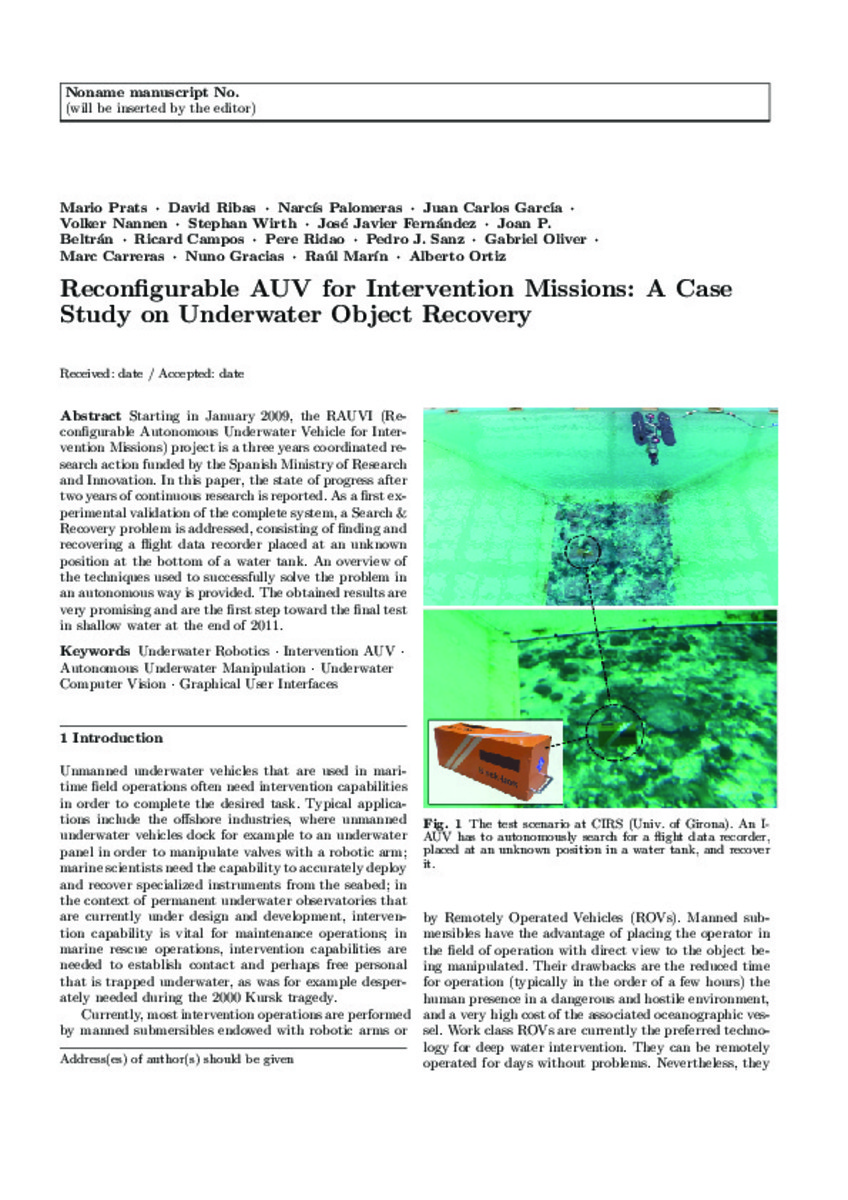
| dc.description.abstract | Starting in January 2009, the RAUVI (Reconfigurable Autonomous Underwater Vehicle for Intervention Missions) project is a 3-year coordinated research action funded by the Spanish Ministry of Research and Innovation. In this paper, the state of progress after 2 years of continuous research is reported. As a first experimental validation of the complete system, a search and recovery problem is addressed, consisting of finding and recovering a flight data recorder placed at an unknown position at the bottom of a water tank. An overview of the techniques used to successfully solve the problem in an autonomous way is provided. The obtained results are very promising and are the first step toward the final test in shallow water at the end of 2011. | ca_CA |
| dc.format.extent | 13 p. | ca_CA |
| dc.format.mimetype | application/pdf | ca_CA |
| dc.language.iso | eng | ca_CA |
| dc.publisher | Springer | ca_CA |
| dc.relation.isPartOf | Intelligent Service Robotics, Volume 5, 2012 | ca_CA |
| dc.rights.uri | http://rightsstatements.org/vocab/CNE/1.0/ | * |
| dc.subject | Underwater robotics | ca_CA |
| dc.subject | Intervention AUV | ca_CA |
| dc.subject | Autonomous underwater manipulation | ca_CA |
| dc.subject | Underwater computer vision | ca_CA |
| dc.subject | Graphical user interfaces | ca_CA |
| dc.title | Reconfigurable AUV for Intervention Missions: A Case Study on Underwater Object Recovery | ca_CA |
| dc.type | info:eu-repo/semantics/article | ca_CA |
| dc.identifier.doi | http://dx.doi.org/10.1007/s11370-011-0101-z | |
| dc.rights.accessRights | info:eu-repo/semantics/openAccess | ca_CA |
| dc.relation.publisherVersion | http://link.springer.com/article/10.1007%2Fs11370-011-0101-z | ca_CA |
Ficheros en el ítem
Este ítem aparece en la(s) siguiente(s) colección(ones)
-
ICC_Articles [419]





